 Home
Home
A Servo Motor is a small device that has an output shaft. This shaft can be positioned to specific angular positions by sending the servo a coded signal. As long as the coded signal exists on the input line, the servo will maintain the angular position of the shaft. As the coded signal changes, the angular position of the shaft changes. In practice, servos are used in radio controlled airplanes to position control surfaces like the elevators and rudders. They are also used in radio controlled cars, puppets, and of course, robots.

A Futaba S-148 Servo
Servos are extremely useful in robotics. The motors are small, as you can see by the picture above, have built in control circuitry, and are extremely powerful for thier size. A standard servo such as the Futaba S-148 has 42 oz/inches of torque, which is pretty strong for its size. It also draws power proportional to the mechanical load. A lightly loaded servo, therefore, doesn't consume much energy. The guts of a servo motor are shown in the picture below. You can see the control circuitry, the motor, a set of gears, and the case. You can also see the 3 wires that connect to the outside world. One is for power (+5volts), ground, and the white wire is the control wire.

A servo disassembled.
So, how does a servo work? The servo motor has some control circuits and a potentiometer (a variable resistor, aka pot) that is connected to the output shaft. In the picture above, the pot can be seen on the right side of the circuit board. This pot allows the control circuitry to monitor the current angle of the servo motor. If the shaft is at the correct angle, then the motor shuts off. If the circuit finds that the angle is not correct, it will turn the motor the correct direction until the angle is correct. The output shaft of the servo is capable of travelling somewhere around 180 degrees. Usually, its somewhere in the 210 degree range, but it varies by manufacturer. A normal servo is used to control an angular motion of between 0 and 180 degrees. A normal servo is mechanically not capable of turning any farther due to a mechanical stop built on to the main output gear.
The amount of power applied to the motor is proportional to the distance it needs to travel. So, if the shaft needs to turn a large distance, the motor will run at full speed. If it needs to turn only a small amount, the motor will run at a slower speed. This is called proportional control.
How do you communicate the angle at which the servo should turn? The control wire is used to communicate the angle. The angle is determined by the duration of a pulse that is applied to the control wire. This is called Pulse Coded Modulation. The servo expects to see a pulse every 20 milliseconds (.02 seconds). The length of the pulse will determine how far the motor turns. A 1.5 millisecond pulse, for example, will make the motor turn to the 90 degree position (often called the neutral position). If the pulse is shorter than 1.5 ms, then the motor will turn the shaft to closer to 0 degress. If the pulse is longer than 1.5ms, the shaft turns closer to 180 degress.
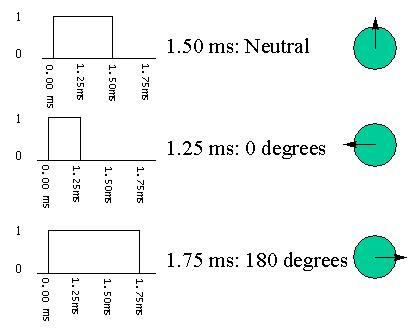
As you can see in the picture, the duration of the pulse dictates the angle of the output shaft (shown as the green circle with the arrow). Note that the times here are illustrative, and the actual timings depend on the motor manufacturer. The principle, however, is the same.
For Indonesian
Motor servo merupakan sebuah motor DC kecil yang diberi sistem gear dan potensio meter sehingga dia dapat menempatkan “horn” servo pada posisi yang dikehendaki. Motor servo ini menggunakan sistem closed control loop sehingga posisi “horn” yang dikehendaki bisa dipertahankan. Motor tersebut harus dapat menangani perubahan yang cepat pada posisi, kecepatan, ketepatan, serta mampu menangani intermitten torque.
Motor servo ialah DC motor dengan tambahan elektronika untuk kontrol Pulse width (PW). Servo mempunyai 3 buah kabel (Vcc, ground, dan PW input), 2 kabel untuk power supply dengan besar tegangan berkisar 5 sampai 7 volt, dan kabel ketiga merupakan kabel pengendali yang dapat langsung dihubungkan ke mikrokontroller. Tidak seperti PWM (Pulsa Width Modulation) / modulasi lebar pulsa (PWM). Pada DC motor, input sinyal untuk servo tidak digunakan untuk mengatur kecepatan tetapi digunakan untuk mengatur posisi dan putaran servo. Metode PWM merupakan suatu metode untuk mengatur pergerakan motor dengan cara mengatur prosentase lebar pulsa high terhadap periode dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor. Bentuk “Horn” pada servo ada dua jenis, yaitu Horn bentuk “X” dan Horn berbentuk bulat. Gambar motor servo dengan bentuk Horn “X” akan ditunjukkan pada gambar di bawah.
Motor servo biasanya digunakan untuk robot berkaki, berlengan atau sebagai aktuator pada mobile robot. Motor servo terdiri dari sebuah motor DC, beberapa gear, sebuah potensiometer, sebuah output shaft dan sebuah rangkaian kontrol elektronik. Motor servo dikemas dalam berbentuk segi empat dengan sebuah output shatf motor dan konektor dengan 3 kabel yaitu powers, control, dan ground. Gear motor servo ada yang terbuat dari plastik, metal atau titanium. Di dalam motor servo terdapat potensiometer yang digunakan sebagai sensor posisi. Potensiometer tersebut dihubungkan dengan output shatf untuk mengetahui posisi aktual shaft. Ketika motor dc berputar, maka output shaftjuga berputar dan sekaligus memutar potensiometer. Rangakaian kontrol kemudian dapat membaca kondisi potensiometer tersebut untuk mengetahui posisi aktual sahft. Jika posisinya dengan yang diinginkan, maka motor dc akan berhenti. Sudut operasi motor servo (operating angle) bervariasi tergantung jenis motor servo. Ada 2 jenis motor servo yaitu:
a. Motor Servo Standart
Yaitu motor servo dilengkapi dengan motor DC untuk mengendalikan posisi sebuah robot yang mampu bergerak CW dan CCW dengan sudut operasi tertentu, misal 600, 900, atau 1800. Rotor robot dapat diputar 180 derajat. Servo motor standar sering dipakai pada sistem robotika misalnya untuk membuat “Robot Arm” (robot lengan).
b. Motor Servo Continuous
Yaitu motor servo yang mampu bergerak CW dan CCW tanpa batasan sudut operasi (berputar secara kontinyu). Sering dipakai untuk mobile robot Rotor robot dapat diputar 360 derajat. (Andrianto, Heri. 2008).
Motor servo biasanya menggunakan tegangan supply 4.8 hingga 7.2 volt.
Alasan penggunaan motor servo untuk bidang robotika adalah pertama, motor servo memiliki putaran yang lambat dan torsi yang kuat (berkat adanya sistim gear). Hal ini cocok dengan bidang robotika, bandingkan misalnya dengan motor DC biasa yang memiliki putaran cepat namun torsi rendah. Poros motor DC yang dihubungkan langsung dengan roda, tidak Akan kuat untuk menggerakkan mobile robot tersebut, demikian juga dengan motor stepper. Kedua jenis motor ini harus dihubungkan terlebih dahulu dengan sistim gear agar dapat dipergunakan. Namun poros servo dapat dihubungkan langsung dengan roda. Kedua, sistim kontrol untuk motor servo relatif sedikit (dipergunakan hanya 1 jalur data saja). Hal ini tentu berbeda misalnya jika kita menggunakan motor stepper yang memerlukan jalur kontrol lebih dari 1 jalur. Oleh karena itu tantangannya adalah bagaimana mengontrol motor servo yang hanya menggunakan 1 jalur tersebut. Oleh karena hanya digunakan 1 jalur data untuk mengontrol motor servo, maka digunakan teknik PWM.
